
Der wohl bekannteste LEGO-Sortierer ist Daniel Wests Universal LEGO Sorting Machine. Seine Arbeit wurde inspiriert von Akiyukis NXT Vision Guided Brick Sorter und Jacques Mattheijs Sorting two metric tons of lego. Mit Fokus auf die Hardware zeigen alle drei Maschinen ein ähnliches vierstufiges Design:
Massenspeicher → Teiletrennung → Klassifizierung → Sortierte Lagerung
Der folgende Überblick betrachtet ein breiteres Feld von Maschinen und zeigt die kreative Vielfalt bei der Gestaltung jeder Stufe.
Stufe 1 — Massenspeicher
Im Massenspeicher befindet sich eine große Menge unsortierter, ineinander verschlungener Steine, und das Ziel ist es, diese nach und nach der Maschine zuzuführen. Es gibt zwei typische Designs für die Massenspeicherung von Steinen. Nr. 1 ist das, was ich den Typ “Band bewegt sich langsam unter einem Haufen Steine” nenne. Zwei schöne Beispiele sind bei Daniels und Jacques Mattheijs Maschinen zu sehen.
 Von Daniel Wests The WORLD’S FIRST Universal LEGO Sorting Machine
Von Daniel Wests The WORLD’S FIRST Universal LEGO Sorting Machine
 Von Jacques Mattheijs Sorting two metric tons of lego
Von Jacques Mattheijs Sorting two metric tons of lego
Während wir bei Daniels Design einen schmalen Massenspeicher haben, bei dem die gesamte Breite des Bodens Steine transportiert, weist Jacques’ Maschine kleine 1x4-Fliesen auf, die auf das Band geklebt sind. Dadurch führt nur der kleine mittlere Teil eine geringe Menge an Steinen zur Maschine. Wenn Sie mehr über diese beiden Maschinen erfahren möchten, haben sowohl Daniel (hier und hier) als auch Jacques zusätzliche Hintergrundinformationen veröffentlicht (Teil 1, Teil 2 und Teil 3).
Das Massenspeicher-Design Nr. 2 basiert auf einem “Stufenförderer”, bei dem sich eine Stufe vertikal durch den Lagerhaufen bewegt und einen kleinen Teil der Steine in die Maschine einspeist. Akiyukis, Francisco Garcias und Johann Rocholls Maschinen verwenden diese Designidee.
 Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter ver1
Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter ver1
 Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
 Von Johann Rocholls Brick feeder prototype
Von Johann Rocholls Brick feeder prototype
Stufe 2 — Teiletrennung
Die Aufgabe der Teiletrennung besteht darin, den Strom verschlungener Steine aufzunehmen und in einzelne Teile zu trennen, die dem Scanner streng nacheinander zugeführt werden können. Die Trennung ist bei LEGOs besonders herausfordernd, da die Teile eine große Vielfalt an Größen (z. B. 1x1-Platten, die in einem Fenster stecken) und auch Reibung (z. B. Steine vs. Gummiräder) aufweisen. Bei den bisher gesehenen Maschinen basiert die Teiletrennung auf einem der folgenden Werkzeuge.
Schikanen-Förderbänder sind Bänder mit diagonalen Barrieren, die die Teile auf dem Förderband zwingen, sich sequenziell auszurichten. Das köstliche Video unten zeigt den Einsatz von Schikanen in der Lebensmittelindustrie.
Hier sind schöne Beispiele für Schikanen-Förderbänder in Lego-Sortiermaschinen.
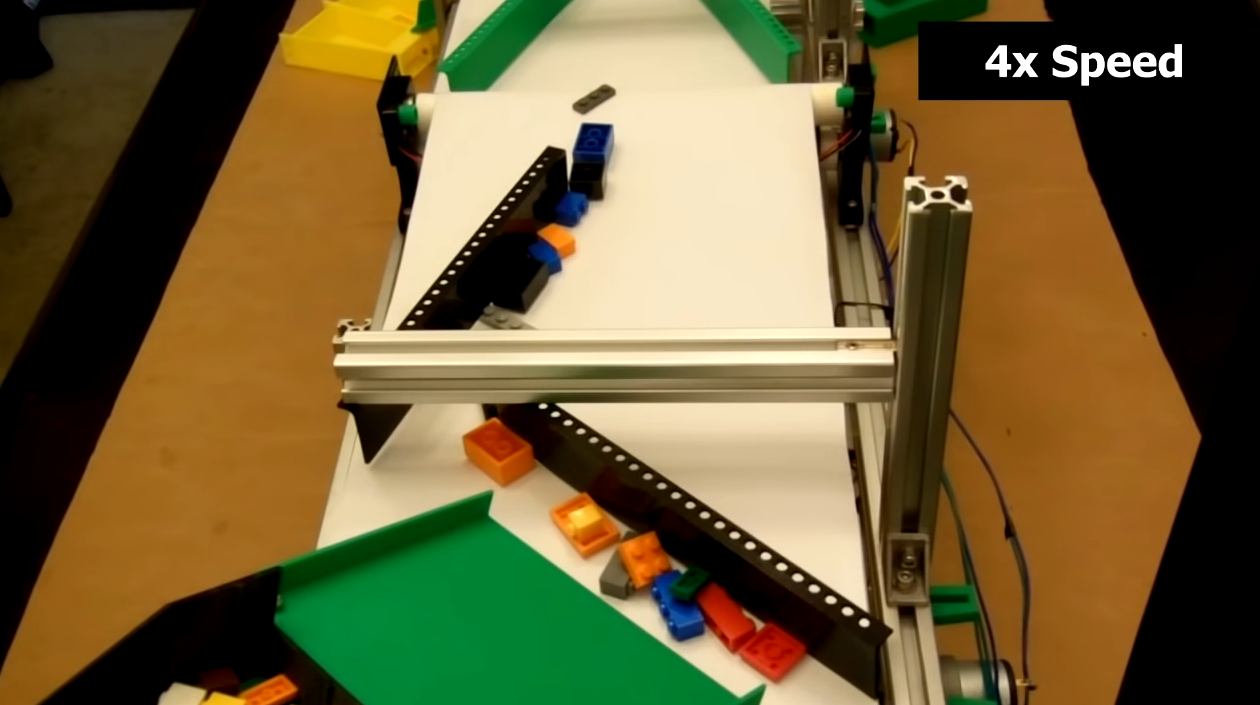 Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
 Von Peter Backx’ Deep Learning Lego Sorter
Von Peter Backx’ Deep Learning Lego Sorter
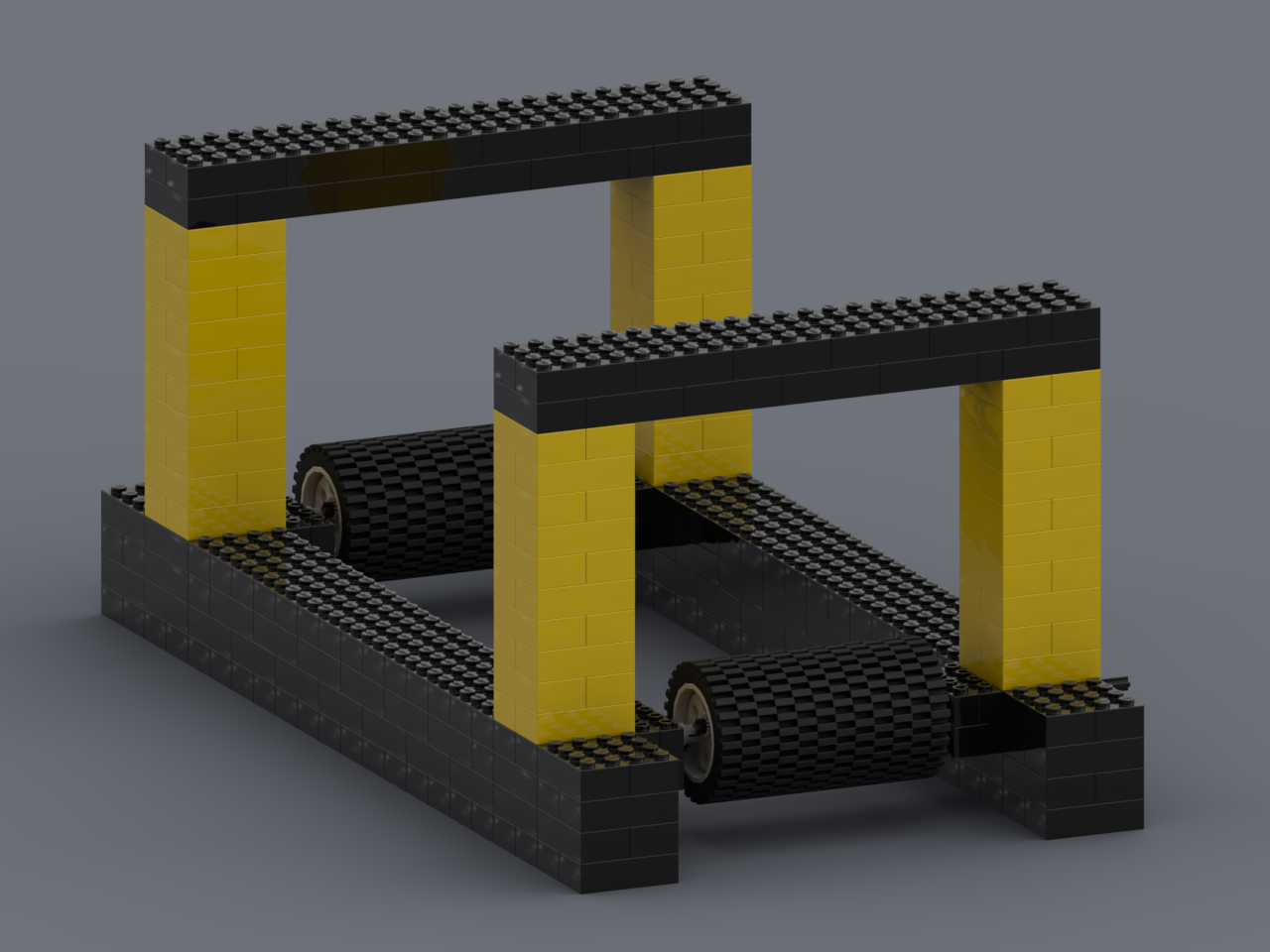
Zwei-Geschwindigkeits-Bandstufen sind eine weitere mögliche Komponente zur Teiletrennung. Sie bestehen aus einem langsam laufenden Förderband, das Teile auf ein zweites, viel schneller laufendes Band fallen lässt. Diese Funktion nimmt bereits sequenziell ausgerichtete Teile auf und verteilt sie in Längsrichtung.
 Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter
Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter
 Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
Der Vibrationsförderer ist der am häufigsten verwendete Teiletrenner. Er schüttelt Teile stark in einem V-förmigen Kanal. Dadurch zwingt er die Teile, sich sequenziell auszurichten. Vibrationsförderer haben den Vorteil, auch verschlungene Teile trennen zu können. Amplitude und Frequenz der Vibrationen sowie die Neigung des Förderers müssen gut abgestimmt sein, um eine gute Trennleistung zu erzielen.
 Von Daniel Wests Universal LEGO Sorting Machine
Von Daniel Wests Universal LEGO Sorting Machine
 Von Jacques Mattheijs Sorting two metric tons of lego
Von Jacques Mattheijs Sorting two metric tons of lego
 Von Chris James’ Big Robot LEGO Sorting Machine
Von Chris James’ Big Robot LEGO Sorting Machine
 Von Johann Rocholls Brick feeder prototype
Von Johann Rocholls Brick feeder prototype
 Von Peter Vs Lego Sorting machine close-up
Von Peter Vs Lego Sorting machine close-up
Auch Kombinationen dieser Designs sind möglich. Das LegoLAS-System von Jörn Schlingensiepen betreibt zwei Vibrationsförderer mit unterschiedlichen Neigungen und somit effektiv unterschiedlichen Transportgeschwindigkeiten. Dies kombiniert die sequentielle Ausrichtung des Vibrationsförderers mit der Längsverteilung der Bandstufe.
 Von Jörn Schlingensiepens Lego Automatic Sorting LegoLAS2.0
Von Jörn Schlingensiepens Lego Automatic Sorting LegoLAS2.0
Stufe 3 — Klassifizierung
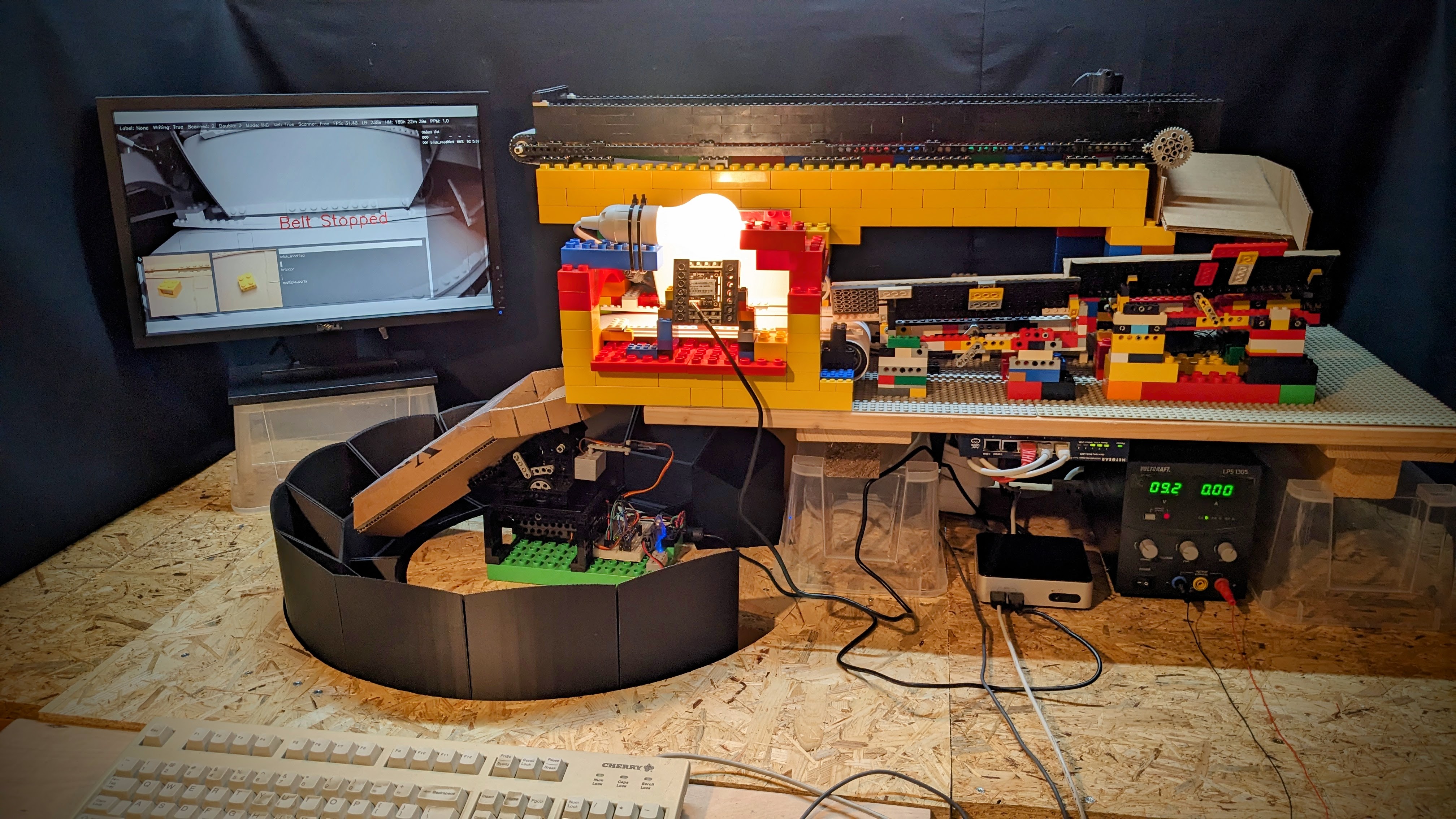
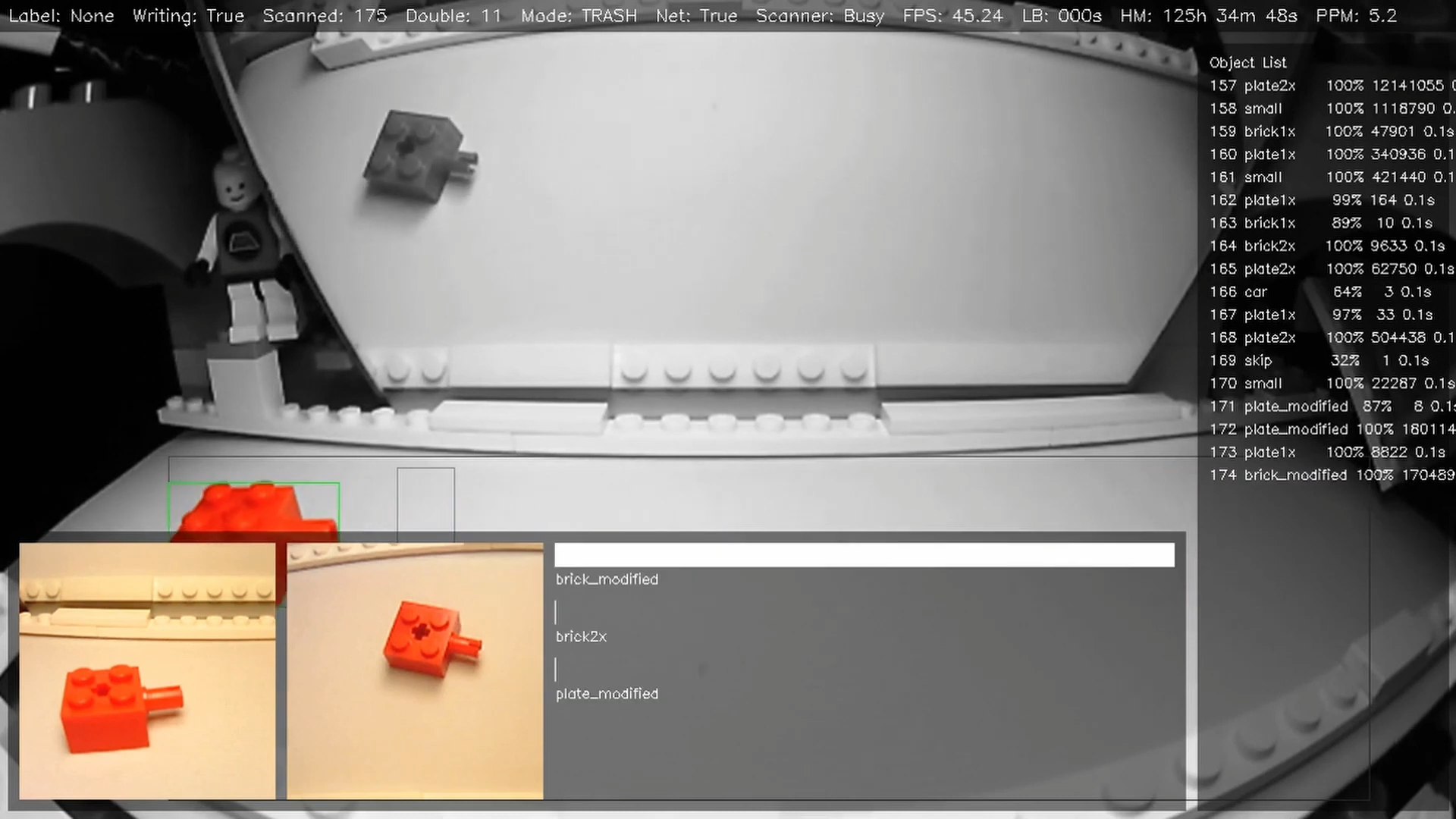
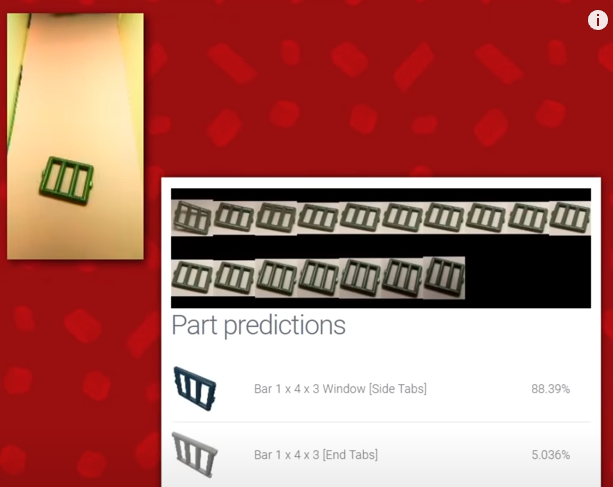
Nach der Teiletrennung werden die Steine einzeln in die Klassifizierungsstufe transportiert. Ihre Aufgabe ist es, Teile oder Teilekategorien zu erkennen/klassifizieren. Die meisten Klassifizierungsstufen basieren auf visueller Erkennung mittels Kamerabildern. Es gibt verschiedene Ansätze, wie kamerabasierte Scanner konzipiert sind. Treibende Motivation ist es, Teile aus mehreren Perspektiven zu erfassen, da Teile manchmal aus bestimmten Winkeln schwer zu unterscheiden sind. Wichtig ist auch eine starke, flimmerfreie Beleuchtung, die von der Umgebung entkoppelt ist. Sie ermöglicht es Kameras, mit sehr kurzen Belichtungszeiten zu arbeiten, um Bewegungsunschärfe zu minimieren.
Mehrere Posen — Daniels Maschine erfasst mehrere Perspektiven, indem sie die Teile auf die Kamera zulaufen lässt. Der Beobachtungswinkel und der Maßstab des Teils ändern sich somit leicht, während sich die Teile nähern. Eine Besonderheit dieses Aufbaus ist, dass der Klassifikator maßstabsunabhängig werden muss. Er kann daher keine absoluten Bilddimensionen als Klassifizierungsmerkmal verwenden.
 Von Daniel Wests Universal LEGO Sorting Machine
Von Daniel Wests Universal LEGO Sorting Machine
Mehrere Kameras — Gijs van Haeffs Sortiermaschine verwendet stattdessen mehrere Kameras, um mehrere Perspektiven gleichzeitig zu erfassen.
 Von Gijs van Haeffs Universal LEGO Sorting Machine
Von Gijs van Haeffs Universal LEGO Sorting Machine
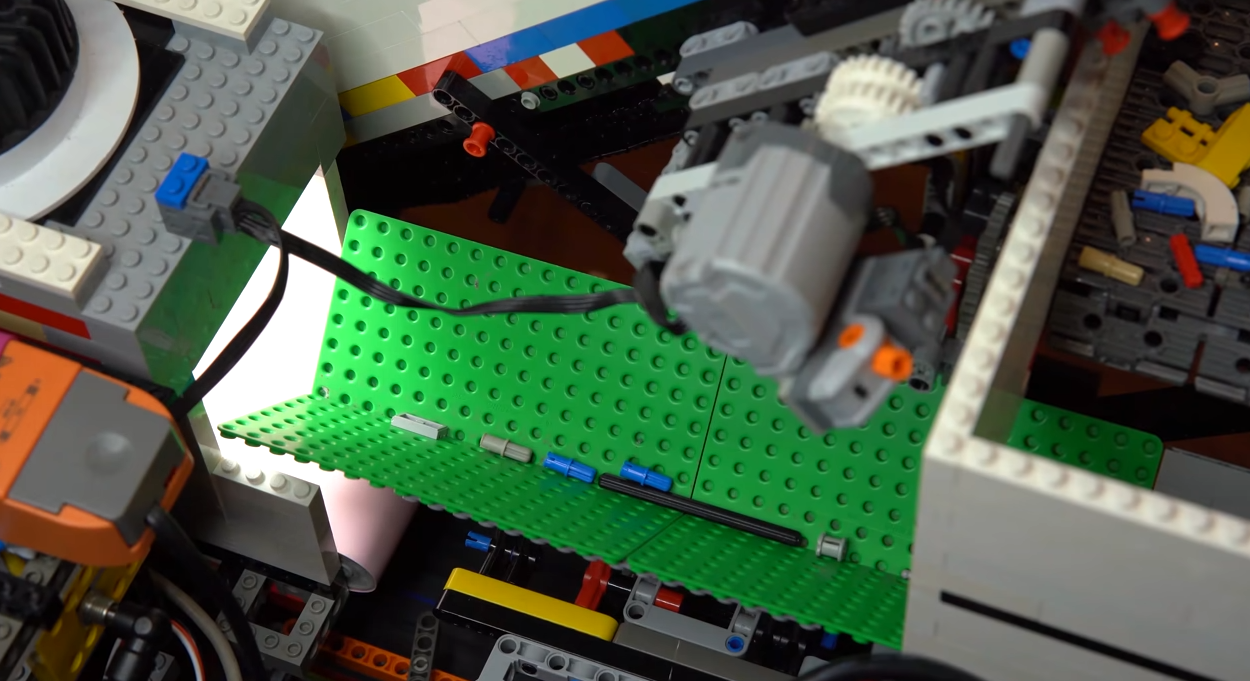
Spiegel — Johann Rocholls Sortierer verfügt über eine einzelne Kamera und einen Spiegel, um zwei Perspektiven gleichzeitig zu erfassen. Dieses Design reduziert die Komplexität, gewährleistet die Synchronisation zwischen den aufgenommenen Bildern und reduziert die Bus-/CPU-Last im Vergleich zur Erfassung mehrerer Kameras erheblich.
 Von Johann Rocholls Conveyor belt for LEGO sorting
Von Johann Rocholls Conveyor belt for LEGO sorting
Smartphone — Spencer Huberts Nexus-Sortiermaschine verwendet ein Smartphone für eine hochwertige Kamera und potenzielle CNN-Beschleunigerhardware.
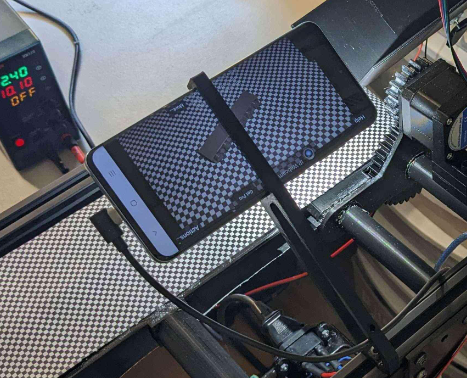 Von Spencer Huberts Nexus
Von Spencer Huberts Nexus
Waage — Teilegewichte sind ein hervorragendes ergänzendes Merkmal zur standardmäßigen visuellen Eingabe für die Klassifizierung. Akiyuki hat seine Lego-Sortiermaschine mit einer digitalen Waage ausgestattet. Dies kann entweder über eine USB-Waage oder über eine Kamera erfolgen, die auf das Display der Waage blickt und eine einfache Zeichenerkennung durchführt. Der Klassifikator muss jedoch angepasst werden, um multimodale Eingaben zu akzeptieren. Es wird auch ein Mechanismus benötigt, um Teile auf die Waage zu schieben und wieder herunterzunehmen. Das Gewichtsmerkmal könnte auch nützlich sein, um mehrere Teile zu erkennen, die fälschlicherweise gleichzeitig der Kamera präsentiert werden. Durch die Kombination von visueller Eingabe mit Teilegewichten können Sortiermaschinen potenziell eine höhere Klassifizierungsgenauigkeit erreichen.
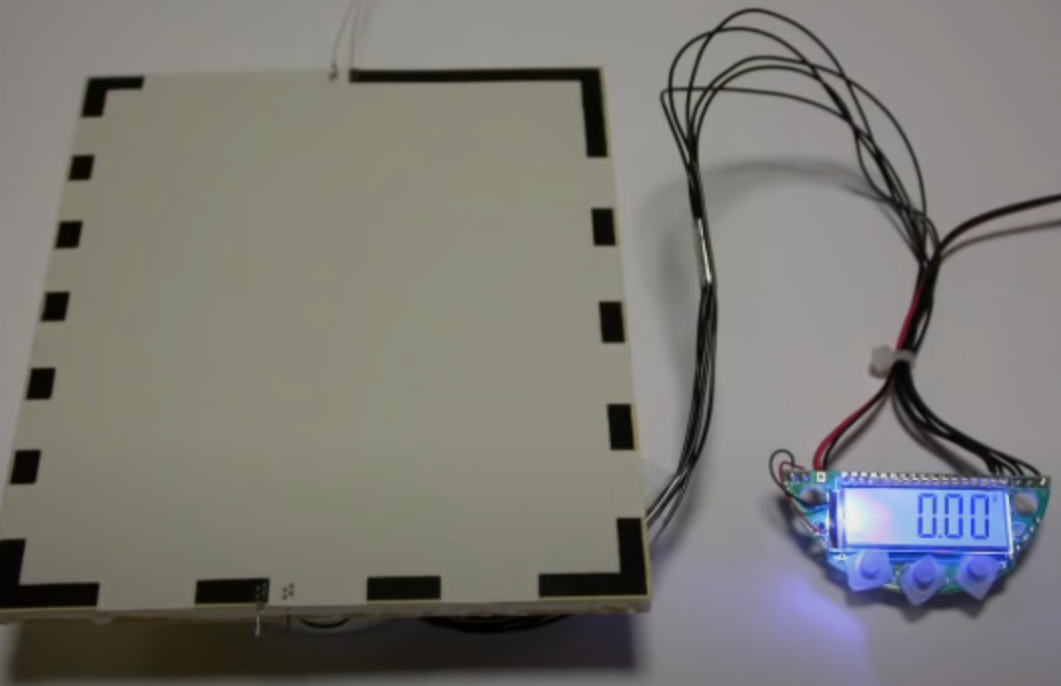 Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter
Von Akiyukis LEGO Mindstorms NXT Vision Guided Brick Sorter
Stufe 4 — Sortierte Lagerung
Nachdem der korrekte Teiletyp in der Klassifizierungsstufe identifiziert wurde, kann das Teil an seinen korrekten Lagerort geleitet werden. Dies kann mit einem der folgenden Ansätze erreicht werden.
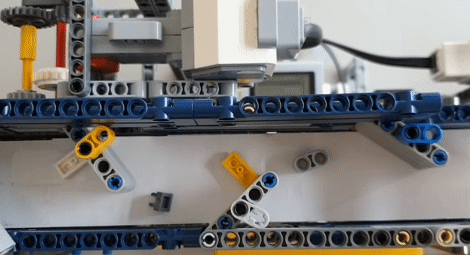
Horizontale Tore — Normalerweise ein Förderband mit mechanischen Armen, die das Teil in den vorgesehenen Behälter leiten. Die beiden folgenden Beispiele leiten das Teil nicht nur, sondern schieben es sogar aktiv in den Behälter, während sie sich schließen. Dies ermöglicht es den Teilen, dichter aufeinander auf dem Band zu folgen.
 Von NealAnthoons’ Lego Sorting Machine
Von NealAnthoons’ Lego Sorting Machine
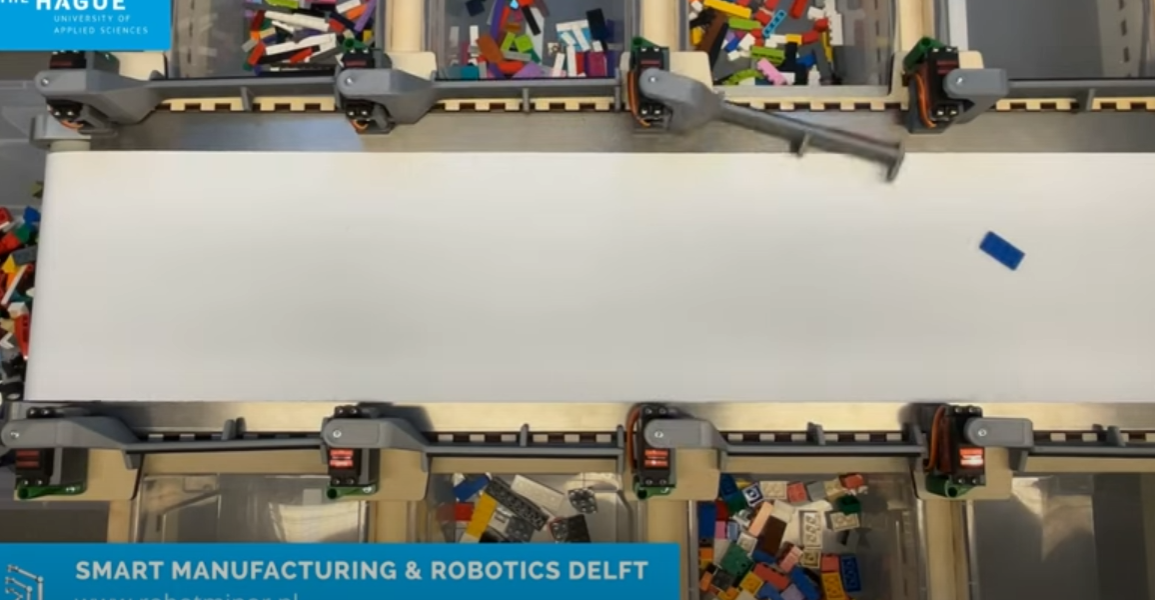 Von Gijs van Haeffs Universal LEGO Sorting Machine
Von Gijs van Haeffs Universal LEGO Sorting Machine
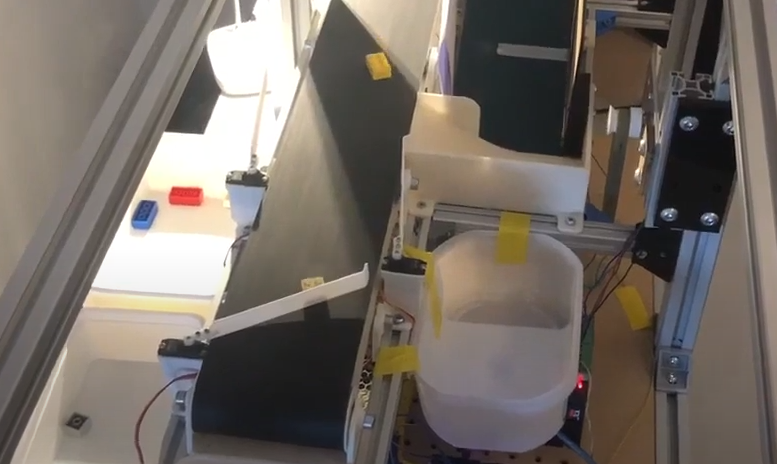
Vertikale Tore kehren das Prinzip um und ersetzen das Förderband durch einen vertikalen Kanal, durch den die Teile fallen. Ein Tor direkt über dem Zielbehälter leitet sie dann an die richtige Stelle. Die Geschwindigkeit des fallenden Teils ist hoch, was eine schnelle Sortierung der Teile ermöglicht.
 Von Johann Rocholls Sorting Machine Flap Design
Von Johann Rocholls Sorting Machine Flap Design
 Von Spencer Huberts Nexus
Von Spencer Huberts Nexus
Pneumatische Sortierer verwenden einen kurzen, gerichteten Luftstoß, um die Teile vom Band in den Lagerbehälter zu schieben. Sie haben sehr wenige bewegliche Teile und verwenden typischerweise ein Magnetventil, das von GPIO-Ports ausgelöst werden kann. Das Timing ist entscheidend, damit die Teile nicht seitlich in den falschen Behälter fliegen. Ein Bandpositionsgeber (z. B. optisch über die wellige Linie in Jacques’ Design) hilft bei der Messung der exakten Band- und damit Teileposition. Ein Band mit seitlichen Stollen (siehe Eppos Vision System unten) hilft, die Teile auf Kurs zu halten, wenn sie mit dem Luftstrom fliegen. Jacques Mattheijs Maschine passt anscheinend sogar die Luftdosis an die jeweilige Teilegröße an. Schließlich ist es sehr hilfreich, einen leisen Luftkompressor zu verwenden, da normale Kompressoren bei längerem Gebrauch ziemlich laut sind. Abgesehen vom Kompressorgeräusch finde ich persönlich, dass pneumatische Sortierer bei der Arbeit super entspannend anzusehen sind 😉
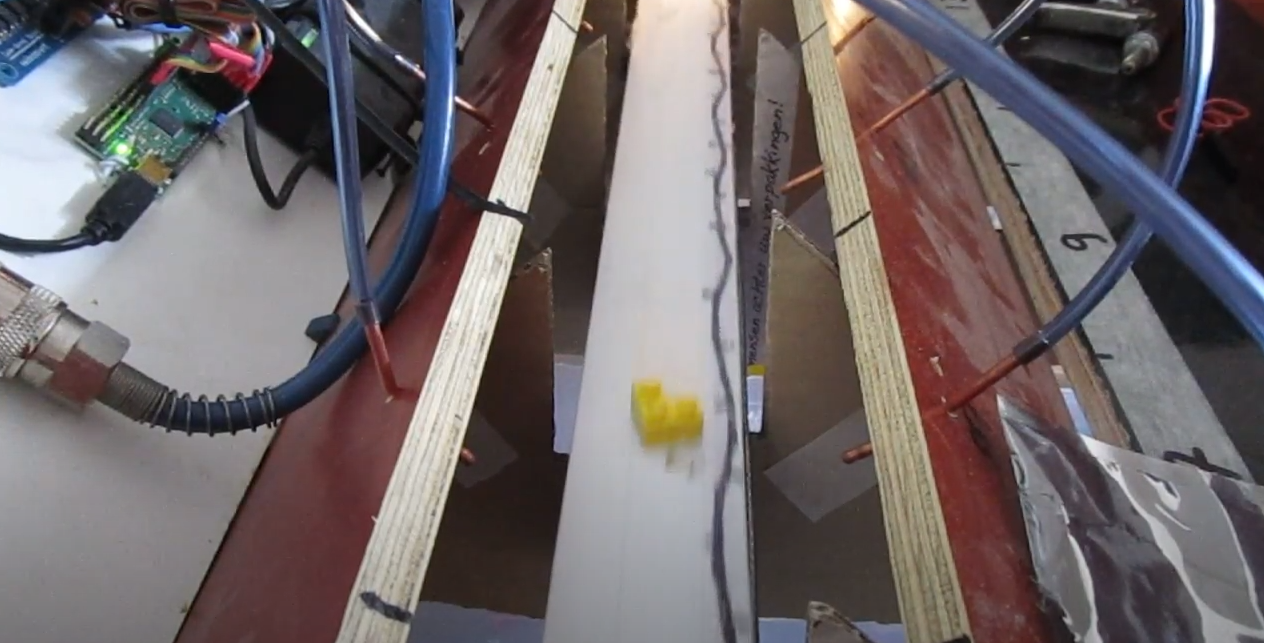 Von Jacques Mattheijs Sorting two metric tons of lego
Von Jacques Mattheijs Sorting two metric tons of lego
 Von Peter Vs The Shape Sifter — First working demonstration
Von Peter Vs The Shape Sifter — First working demonstration
 Von Eppos Vision Systems Automatic LEGO sorting machine
Von Eppos Vision Systems Automatic LEGO sorting machine
Drehweichen verwenden ebenfalls mechanische Servos, aber anstatt nur binär ein Tor zu öffnen oder zu schließen, wählen sie einen von vielen Lagerorten aus, indem sie eine Weiche auf das Ziel richten. Dieses Design ist sehr effizient in der Anzahl der benötigten Servos. Theoretisch könnten sogar mehrere solcher Weichen kaskadiert werden.
 Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
Von Francisco Garcias Lego Sorter with TensorFlow on Raspberry Pi
 Von Claus Christiansens Automated AI LEGO Sorting machine
Von Claus Christiansens Automated AI LEGO Sorting machine
 Von Jörn Schlingensiepens Lego Automatic Sorting LegoLAS2.0
Von Jörn Schlingensiepens Lego Automatic Sorting LegoLAS2.0
 Von Michael Talarczyks LEGO Sortierer (Color Sorter) mit raspberry pi
Von Michael Talarczyks LEGO Sortierer (Color Sorter) mit raspberry pi
Greifroboter sind die letzte Variante von Sortiersystemen. Ein Roboterarm greift die Teile, bewegt sich über eine 2D-Anordnung von Lagerorten und lässt sie in den jeweiligen Behälter fallen. Während eine solche Teilehandhabung mehr Zeit in Anspruch nimmt, ermöglicht die zweidimensionale Lagermatrix eine extrem große Anzahl von Behältern.
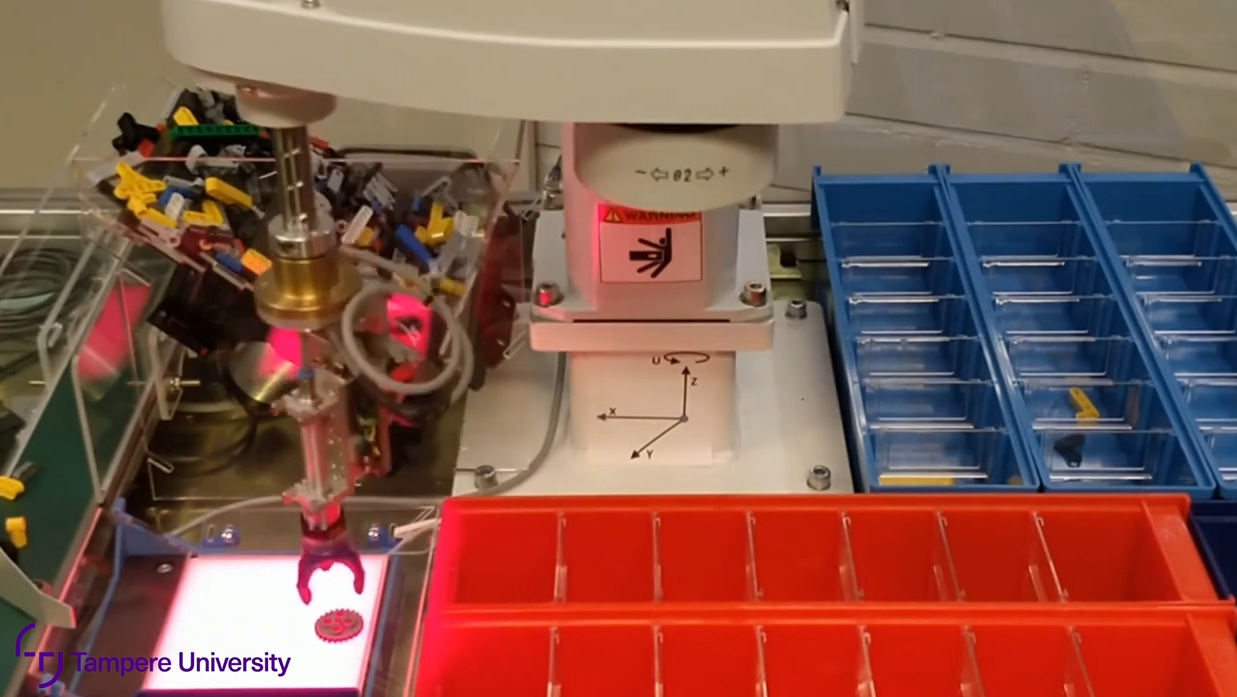 Von der Tampere University Robotic LEGO sorting robotwith machine learning
Von der Tampere University Robotic LEGO sorting robotwith machine learning
 Von RBTX First automatic Lego™ bricks sorting system
Von RBTX First automatic Lego™ bricks sorting system
Aktuelle Updates
In der Zeit, seit ich diesen Artikel geschrieben habe, entstehen weiterhin neue Maschinen. In diesem Abschnitt versuche ich, mit kürzlich veröffentlichten Maschinen Schritt zu halten.
2023–12–27
360er0/awesome-lego-machine-learning gibt einen großartigen Überblick über LEGO-Machine-Learning-Projekte, einschließlich vieler Sortiermaschinen.
2024–03–13
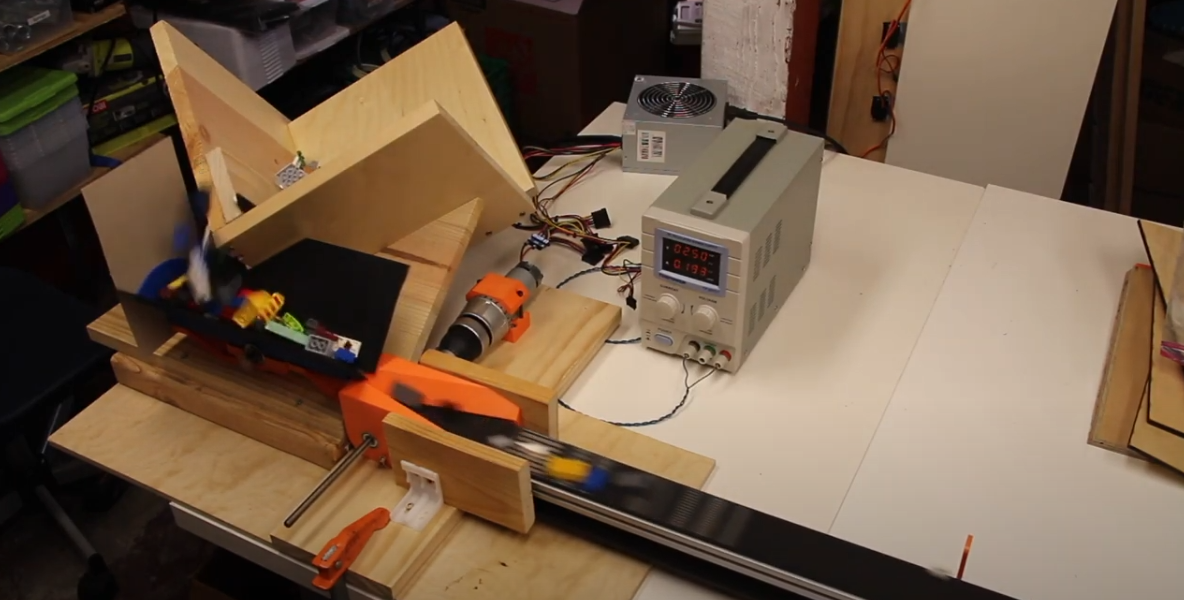
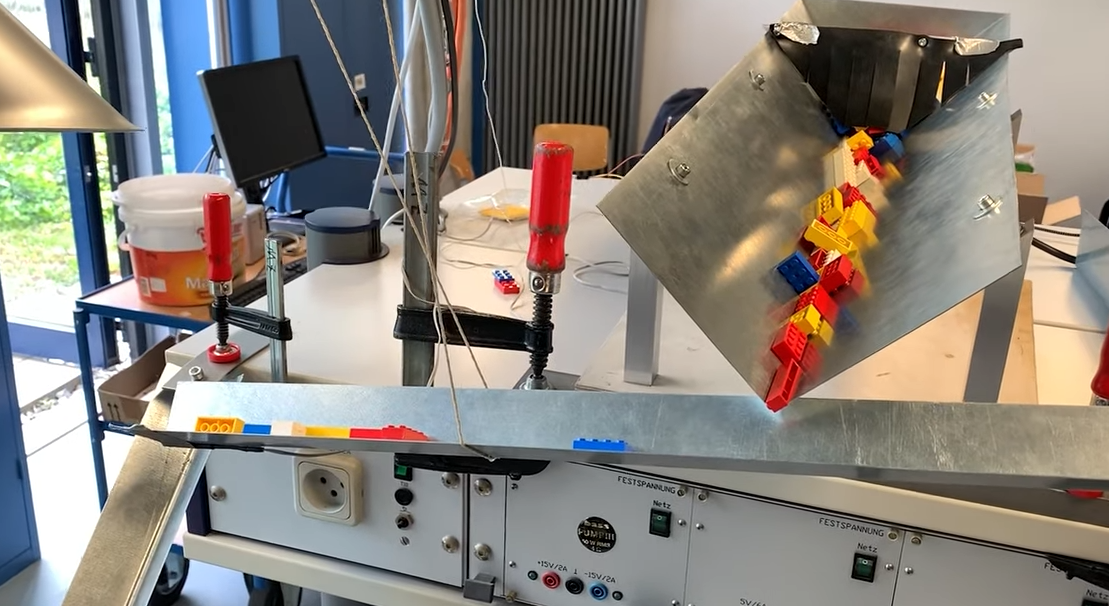
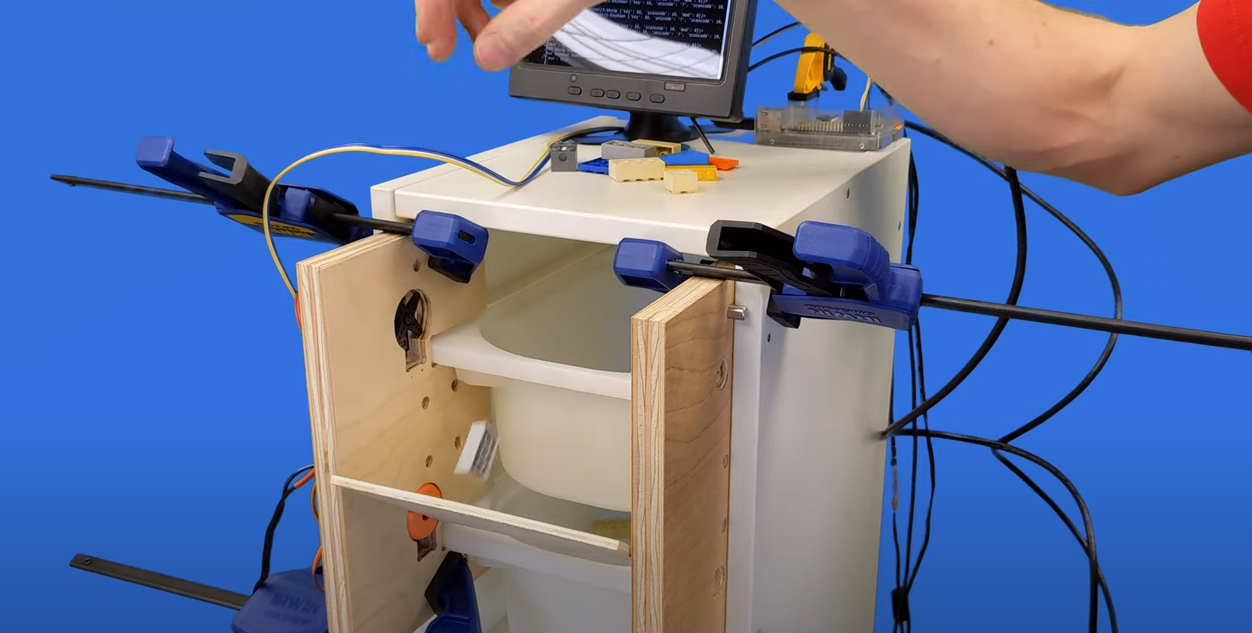
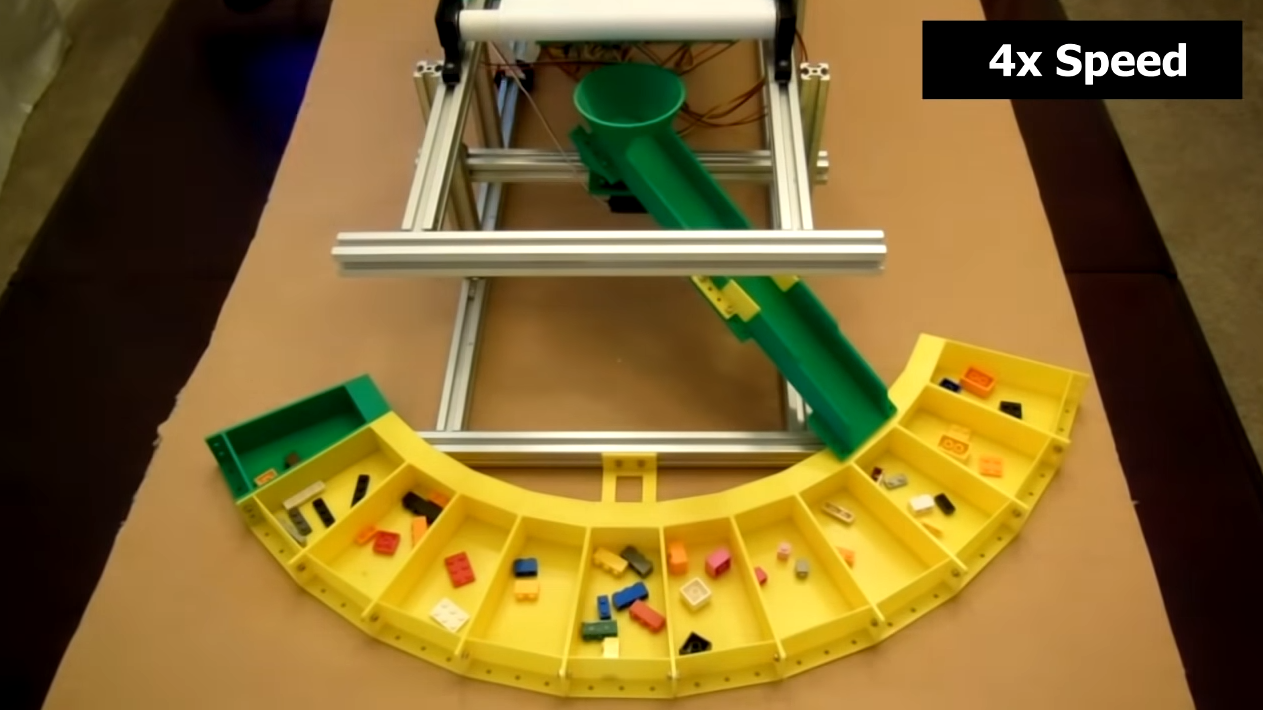
Freakstuff hat ein Video über seine automatische Sortiermaschine veröffentlicht. Das Besondere an diesem Projekt ist, dass es rein mechanisch ist. Es sortiert LEGO-Teile nach Größe. Dies ist sowohl für die anschließende manuelle Sortierung sehr nützlich als auch als vorbereitender Schritt für die automatisierte Formsortierung. Bei der Formsortierung ist die Teiletrennung eine sehr schwierige Aufgabe, die viel einfacher wird, wenn die Teile nach ähnlicher Größe vorsortiert sind.
 Von Freakstuffs automatischer Sortiermaschine (Deutsch)
Von Freakstuffs automatischer Sortiermaschine (Deutsch)
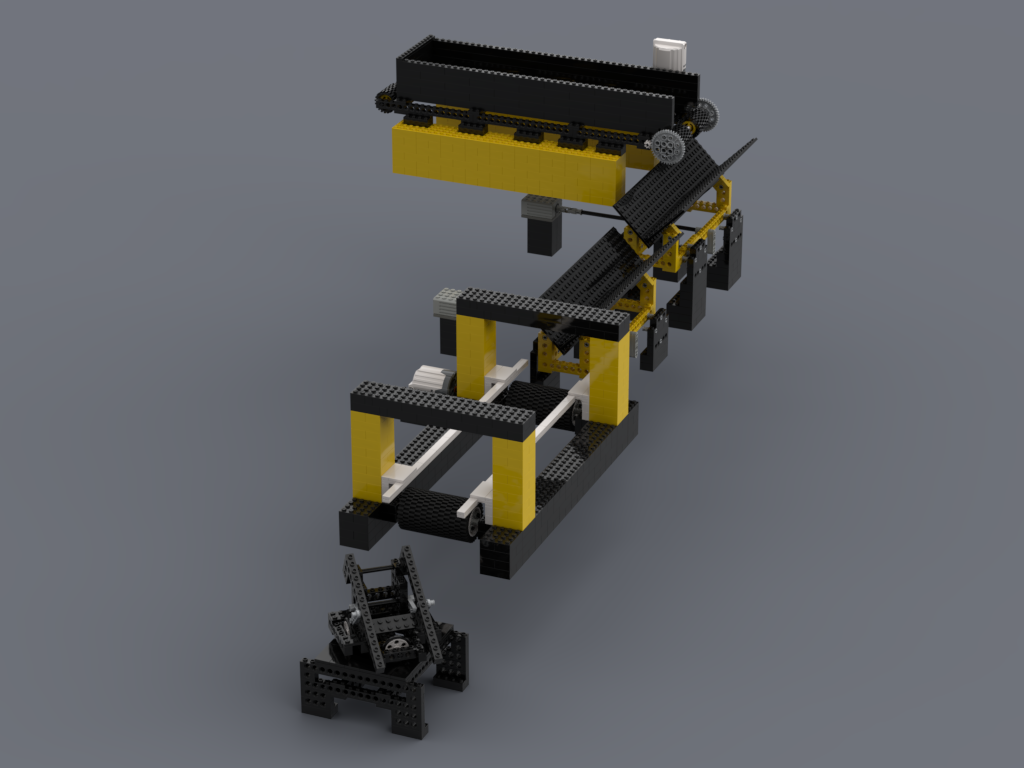
Betrachtet man das Design im Detail, so sind die 4 typischen Stufen immer noch erkennbar, auch wenn sie auf interessante Weise gruppiert sind.
Der Massenspeicher ist als Holzkiste mit einem Stufenförderer organisiert, der einen konstanten Teilezufluss gewährleistet. Die Stufe ist parallel zu einem Förderband ausgerichtet. Mit jedem Hub gibt die Stufe einen genau definierten Teil der Steine in Längsrichtung auf das Förderband ab. Dies realisiert die erforderliche Teiletrennung.
 Freakstuffs Stufenförderer
Freakstuffs Stufenförderer
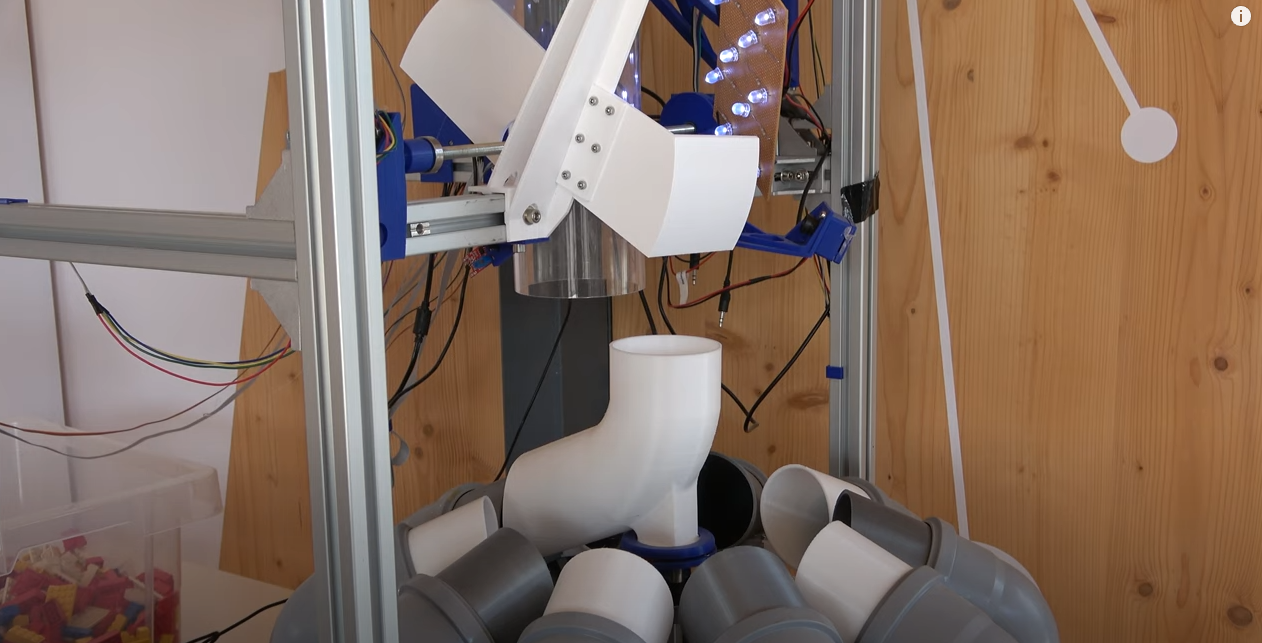
Die Teileklassifizierung (nach Teilegröße) wird durch eine Sequenz von Siebröhren mit progressiv größeren Öffnungen implementiert. Kleine Teile fallen in den frühen Stufen durch die Öffnungen, größere Teile werden weiter transportiert, um in einen späteren Behälter zu fallen.
Die Sieböffnungen sind spiralförmig gestaltet. Dies ist eine sehr interessante Wahl, die laut Freakstuff entscheidend dafür ist, dass die Teile sich kontinuierlich durch die Röhren bewegen.
 Freakstuffs spiralförmige Siebröhren
Freakstuffs spiralförmige Siebröhren
Laut Freakstuff wird seine Maschine bereits in seinem BrickLink-Shop produktiv eingesetzt, gefolgt von manueller Sortierung für einzelne Teile. Er plant, den Aufbau um eine visuelle, klassifizierungsbasierte automatische Sortierstufe zu erweitern. Die Klassifizierung soll über den Webdienst brickognize realisiert werden. Generell bleibt es interessant, das Projekt auf seinem Kanal zu verfolgen.
2024–05–21
In einer parallelen Entwicklung arbeitet Smyrnoff Specialist Lego Parts seit Januar dieses Jahres ebenfalls an einem vollmechanischen Sortierer. Das Design ähnelt dem Ansatz von Freakstuff und verwendet Rohrmodule mit progressiv größeren Abmessungen zur Teilesortierung. Jedes Modul enthält eine Spiralform für einen effizienten Teiletransport. Diese Maschine besteht aus einer Kombination von LEGO-Elementen sowie 3D-gedruckten Komponenten.
 Sorter for LEGO® bricks von Smyrnoff Specialist Lego Parts
Sorter for LEGO® bricks von Smyrnoff Specialist Lego Parts
Feedback und Kontakt
Wenn Sie ebenfalls gerade dabei sind, eine Sortiermaschine zu bauen, würde ich mich freuen, von Ihnen zu hören. Auch wenn Sie eine fehlende Maschine/ein fehlendes Design zu dieser Liste hinzufügen möchten, kontaktieren Sie mich bitte. In allen Fällen bin ich am einfachsten per DM als BrickSortingMachine auf Instagram zu erreichen.